Development
Process of research on form and materials



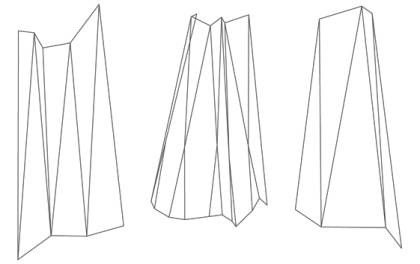
Starting with computergenerated forms, based on polygons , i. e. in their basic form of triangles, first geometric bodies are shaped.
Through the combination of light and light-refraction/ -reflection crystalline and sharp objects were formed, which resembled overlapping crystall-formations and prisms. As subsequentially unfolded form the objects are more space-takenly perceptible.
The functionality of the elements meets several criteria. As independent elements in the space they are at the same time obstruction and transparency and always in some angle of the observer/bystander. This is made possible by the height and the material perspex.
 As
whole and massively strong bodies would show too great a presence and
closeness, the forms were therefore developed toward unfolded
crystalline bodies, which in their verticality are shifting themselves
easily and almost onedimensionally into the gaze of the observer. Through
the transparency of the material space and forms can be perceived alike.
As
whole and massively strong bodies would show too great a presence and
closeness, the forms were therefore developed toward unfolded
crystalline bodies, which in their verticality are shifting themselves
easily and almost onedimensionally into the gaze of the observer. Through
the transparency of the material space and forms can be perceived alike.
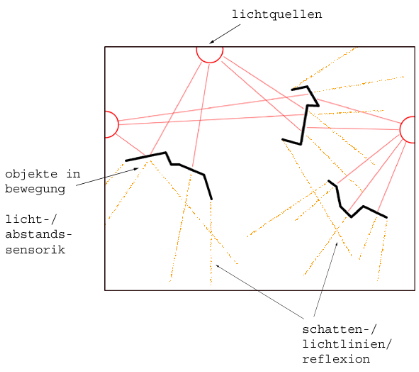
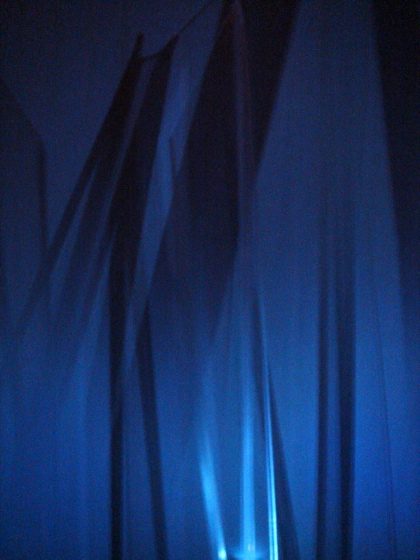
Furthermore by using selective strong lightsources a complex impression of the space and an adjustment of perception is generated, dependent on the fixation of one's own angle.
The tape, which is bordering the single pieces of triangles linear, on the one hand keeps them together, on the other hand divides them visually. The shadows of the elements are becoming more apparent and comprehensable. Reflections on the tape and the linearity of the glass fibres inside it draw the attention.
The vantage point of the visitors is guided beginning with the pedestal of the elements, then seeing through the materiality focussing onto the surrounding walls.
 The
material plexiglass itself creates more or less ambiguous, subtly
silhouettes, furthermore it has the quality of conducting light on its
edges and secondary irradiate lines/images of light.
The
material plexiglass itself creates more or less ambiguous, subtly
silhouettes, furthermore it has the quality of conducting light on its
edges and secondary irradiate lines/images of light.
 The
space is traced and retraced by the movement of the objects and the
reaction on the formation of space. This can be observed
over a longer passage of time and some patience by the movement of the
formation of shades. The contemplator is therefore always in a new
coherence with the surrounding space.
The
space is traced and retraced by the movement of the objects and the
reaction on the formation of space. This can be observed
over a longer passage of time and some patience by the movement of the
formation of shades. The contemplator is therefore always in a new
coherence with the surrounding space.
Sensor Technology
Based on the Atmel microcontroller different possibilities of impulses and sensor technology are tested and experimented with. The result is a technical prototype for further evaluation of sensor types and interdependency patterns in reactions. The application of distance sensors, in this case ultrasound and infrared, facilitate a balanced navigation in any space.
Ultrasound-sensors provide data of distances between the bodies and the limitations of the space for the central processing unit. By establishing a front and rear side the midpoint between two bodies can be acquired, the object can be aligned accordingly. That way a balance between two points is searched for constantly.
The infrared sensors are able to detect and evade objects (which are moving in the field of vision of the sensors) in the immediate area (< 80 cm).
The combined sensor data in the programming enable a constant adjustment of the objects to their environment, including visitors and limitations of the space. The movement and the application of the elements is therefore independent on the conditions of a space. Through their programming and sensor technology they are operating in any environment.
Drive and steering is handled through servo motors and mounted wheels. To stabilise the construct two additional, steering roller are used.
The sensors are mounted parallel and vertical to the axle. Each pair consists of one SRF05 ultrasound-sensor and one Sharp GP2D infrared-sensor on the right, left, front and rear. The sensor-motor coupling is based on principle of a simple Braitenberg Vehicle: the sensors are cross-over connected with the motors, the left group of sensors with the right wheel and vice versa.
The coupling of the wheels with the sensor technology is linear. Thus a small value of the infrared sensors (close-up range) causes a high impulse of the opposing motor. The vehicle avoids an obstruction. In the case of the ultrasound sensors (long-range) the values of the sensors of one direction is compared with the data of the other one. The impulse to move forward or backward is a consequence out of the compared data.